 CH
CH EN
EN

Positioning method
At present, UWB positioning is mainly through TOF ranging positioning, TDoA positioning, AoA positioning, the first two can generally
be used separately, and the latter AoA is generally integrated with ToF or TDoA positioning.
ToF localization
ToF positioning is based on range-ranging, the tag and each base station that needs to be located initiate the ranging, and the location
is calculated after the ranging is completed. In zero-dimensional mode, only one base station needs to be ranging. In one-dimensional
mode, at least one base station needs to be located. In two-dimensional mode, three or more base stations are generally required to
range, and in special mode, two base stations can be located. 3D requires ranging with four base stations;
In one-dimensional special cases, the base station is placed at the top, and only a base station ranging can also complete
one-dimensional positioning.

2D special case, can only and two base station ranging

In general, two-dimensional positioning

TDoA location
TDoA is based on arrival time difference positioning, and the system needs to have accurate time synchronization function. The primary
problem of TDOA is to solve the problem of time synchronization. There are two kinds of time synchronization, one is time synchronization
through wired, which can be controlled within 0.1ns and has a very high synchronization accuracy. However, due to the use of wired,
all devices either adopt the central network mode or adopt the cascading mode, which increases the complexity of network maintenance.
It also increases the complexity and cost of construction. In addition, there is a dedicated wired time synchronizer in the system, which
is expensive.
The first is to do time synchronization through wireless, wireless synchronization can generally reach 0.25ns, the accuracy is slightly
lower than wired time synchronization, but its system is relatively simple, positioning base station only need power supply, data return
can be used by WiFi, effectively reducing the cost.
After the base station time synchronization, the tag sends a broadcast packet. After the base station receives the packet, the tag marks
the timestamp of the received packet and sends the content to the computing server. Then the computing server calculates the target
location based on the timestamp of the positioning packets of other base stations.

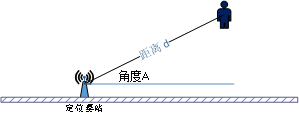
AoA positioning
AoA positioning is generally based on the phase difference method to calculate the Angle of arrival, generally not used alone, because
AoA involves the problem of angular resolution, if only AoA positioning, the farther away from the base station, the worse the positioning
accuracy.
AoA can coordinate with ToF ranging current positioning, in this mode, a single base station can complete the positioning.
Two base stations can also be positioned through AoA

Positioning method selection
The selection of positioning method involves many factors, which need comprehensive judgment in the system to better meet the use
of the system.
Capacity factor
In range-based mode, the capacity is relatively low;
In TDOA mode, if the transmission rate of 6.8Mbps is adopted, the packet of the label is limited to 12 bytes, the duration of each packet
is 95 microseconds, and the frequency of each label is 1Hz, and the system capacity is close to 1500 labels.
If ToF is used with AoA, system integration can be significantly improved. For example, only one base station is measured, and other
base stations assist in Angle judgment to complete positioning, and system capacity can be significantly improved.
Positioning mode and power consumption
Here is mainly to compare the power consumption of ToF and TDoA two modes, ToF mode, the label needs to be measured one by one
and the base station, the need for multiple ranging, generally a round of ranging down, the need for more than 5ms. In TDoA mode, the
tag only needs to send one packet to complete the localization. Generally, the process from preparation to sending is completed within
0.5ms, and its power consumption is significantly lower than that of the ToF mode.
Environmental factor
There are many environmental factors, the most typical of which are intra-regional positioning and out-of-area positioning.
Since TDoA is based on the arrival time difference, after the arrival time difference is converted into the distance difference, the hyperbola
algorithm is generally adopted. However, the limitation of the hyperbola algorithm determines that the positioning accuracy is high in the
area surrounded by the base station, and the positioning accuracy is relatively poor outside the area. In the case of complex environment
such as power plants, the system is faced with great difficulty in construction, and it is difficult to meet the needs of applications with TDoA
positioning. In this mode, ToF positioning can be adopted, or TDoA fusion AoA positioning method can be used to solve the problem.
Position calculation
There are many modes of location calculation to choose from, and there are four typical ones:

The first is to do calculations on the server, which is a more conventional application;
The second is to do the calculation on the base station, which is the case that the target is relatively small, can effectively save costs;
The third is to calculate on the label, which is mainly used in the positioning mode of robots and drones, requiring rapid response and
output the calculation results to the target platform;
The fourth, autonomous spatial positioning, all the devices calculate their own, for the space AD hoc network.
The first and third schemes are commonly used.





